|
|
RCK Ruđera Boškovića - mobilna / uslužna robotika
|
Nevizualni senzori
Senzori koji ne koriste reflektiranu svjetlost od objekta za percepciju okoline već se koriste na primjer audio signalima, IR svjetlosti, inercijskim senzorima i ostalim metodama.
Dijelimo ih na:
Proprioceptivne senzore odnosno na senzore unutarnjeg stanja robota kao što su brzina robota, stanje baterije, opterećenje kotača.
Eksteroceptivni senzori odnosno vanjske senzore kojima je zadatak ustanoviti stanje okoline u kojoj se robot kreče kao što je udaljenost od prepreke.
Nadalje se senzori dijele na:
Aktivne senzore koji emitiraju energiju u okolinu i detektiraju reakciju okoline na odaslanu energiju kao što su enkoderi, ultrazvučni senzori, laserski senzori, IR senzori udaljenosti.
Pasivni senzori koji primaju energiju iz okoline te obrađuju primljene signale kao na primjer senzori temperature, CCD i CMOS kamere, mikrofoni, kontaktni senzori.
Osnovne karakteristike pri odabiru senzora:
Brzina rada (odziv) senzora je brzina kojom senzor mjeri i daje mjerne informacije pri kontinuiranom i diskontinuiranom mjerenju. Vremensko kašnjenje od detekcije do obrade i predaje mjernog podatka.
Pogreška mjerenja. Za svaki mjerni uređaj deklarirana je klasa točnosti u kojoj uređaj radi te je time određena granica pogreške mjernog podatka. Kod senzora govori se o mjernoj nesigurnosti koja se procjenjuje statističkim metodama i obuhvaća širi spektar utjecaja na mjerni signal na primjer: umjerenost, mjerni šum, starenje senzora, temperatura itd.
Robusnost senzora. Jedna od primjena mobilnih robota je u okolini opasnoj za ljude kao na primjer deaktiviranje mina, požari, hladna okolina, nuklearno zračenje i slično. Roboti namijenjeni za rad u ekstremnom okruženju zahtijevaju robusniju izvedbu senzora. Pitanje toleriranja različitih odstupanja okoline od idealnih radnih uvjeta je važno za izbor odgovarajućeg senzora za danu primjenu. Relevantni faktori za ispitivanje robusnosti su: mehanička otpornost, elektromagnetske smetnje , temperatura, vlaga, ugradnja i mogućnost brze zamjena itd.
Računarski zahtjevi. Izlaz kontaktnog senzora je obični kontakt koji daje binarni podatak na ulazu mikroupravljača i ne zahtjeva veliku programsku podršku. Analogni signali iz senzora zahtijevaju korištenje perifernih sklopova mikroupravljača za A/D pretvorbu, te veću programsku podršku obrade podatka i dulje vrijeme obrade. Senzori povezani nekom od serijskih komunikacija osim komunikacijskog protokola moraju odvojiti programski dio za obradu primljenih podataka. Sistem vizije kamerama zahtijevaju značajne programske resurse i moćne procesore za obradu podataka.
Napajanje, masa i dimenzije senzora. Senzori su izvedeni tako da zahtijevaju minimalnu energiju za svoj rad. Neki senzori zahtijevaju kontinuirano napajanje, dok postoji senzori koji se aktiviraju samo u trenutku mjerenja. Robusniji senzori imaju veću masu i dimenzije, te neke specifičnosti ugradnje.
Kontaktni senzori
Kontaktni senzori su mikro-prekidači ili granični prekidači kojima je duljim ticalom produljeno područje aktivacije. Spadaju u pasivne senzore. Smještaju se na rubove robota tako da detektiraju blizinu prepreke kojoj se robot približio. Robusno su izvedeni i jeftini su. Prilikom mikroupravljačke obrade promjene stanja kontakta potrebno je pripaziti na titranje kontakata.
Slika 1.
Kao kontaktni senzori mogu se primjenjivati potenciometri kojima se osovina zakreče ovisno o odaljenosti od prepreke, te je moguće izvesti precizno približavanje robota prepreci.
Taktilni senzori (senzori dodira)
Koriste se za djelovanje robota na okolinu odnosno na neki predmet u okolini. Taktilna (dodirna) percepcija daje informacije o:
- Poziciji i orijentaciji objekta
- Mehaničkim karakteristikama (masa, elastičnost, plastičnost)
- Fizičkom stanju (temperatura, vlažnost)
Sastoje se od više senzora različitih namjena ovisno o sofisticiranosti taktilnog senzora.
U praksi se koriste:
- Senzori s otpornim trakama
- Elektromagnetski senzori
- Kapacitivni senzori
- Piezo-električni senzori
- Optički senzori
- Termički senzori
Enkoderi
Postoje dvije vrste enkodera:
- Inkrementalni – za pomak ili rotaciju enkoder daje određen broj impulsa koji ovisi o rezoluciji enkodera (broj impulsa po jednom okretaju ili pomaku za 1m) Brojanjem impulsa enkodera moguće je izračunati brzinu kretanja, prevaljeni put te relativnu poziciju.
- Apsolutni – uvijek daje podatak o poziciji rotora bez potrebe za brojanjem impulsa. Različitih rezolucija u Grejevom (Frank Gray) kodu.
Inkrementalni enkoder
Izvedbe inkrementalnih enkodera:
- S magnetima i senzorima koje aktivira magnet (reed relej , binarni hall senzor)
- Reed relej
Izveden kao radni kontakt kojeg preklopi magnetsko polje magneta. Smješten u različitim kućištima.
Slika 2.
Primjenjuje se pri nižim frekvencijama impulsa, te je poželjno otkloniti titranje kontakata ovisno o primjeni.
- Binarni hall senzor magnetskog polja
Elektronički sklop najčešće smješten u SMD kućište SOT89 ili kućište s nožicama tip TO-92S. Prilikom odabira potrebno obratiti pažnju na nominalni napon napajanja i odabrati senzor u sklopnom režimu rada jer postoje i analogni hall senzori kojima mjerimo jačinu magnetskog polja. Za primjenu kod enkodera potreban je binarni senzor odnosno u sklopnom režimu rada. Takva vrsta senzora koristi se kod očitanja pozicije rotora BLDC motora. Za detalje potrebno je pogledati stranicu proizvođača senzora na primjer Allegro MicroSystems. Hall senzor A3141 često se koristi u mobilnoj robotici.
Slika 3.
Izvedba rotacionog i linearnog enkodera:
Slika 4.
Maksimalna brzina rotacije ili linearnog pomaka ovisi o brzini odziva senzora i broju magneta po obodu ili duž linearnog elementa. Što su magneti gušći to je rezolucija enkodera veća, što daje bolju preciznost.
- Optički enkoder
Slika 5.
Pogodan za visoke frekvencije odnosno velike brzine vrtnje diska s otvorima. Kao izvor svjetlosti koristi se IR (infracrvena) LE dioda.
Izlazi inkrementalnog enkodera:
- Jednofazni inkrementalni enkoder
Mjeri brzinu vrtnje osovine, ali ne može odrediti smjer vrtnje, a time niti poziciju slika.
- Dvofazni inkrementalni enkoder
Izveden je tako da se dodaje još jedan izvor svjetlosti s fotoosjetljivim elementom koji je smješten tako u odnosu na disk s otvorima da daje impulse kao na slici.
Slika 6.
Impulsi na izlazu B su fazno pomaknuti za 90° u odnosu na izlaz A što se ostvaruje fizičkim smještajem faze A i B. Ukoliko se promatra smjer vrtnje (CW) odnosno u smjeru kazaljke na satu tada se prvo pojavi impuls na fazi A, a zatim na fazi B. Kod obrnutog smjera vrtnje od kazaljke na satu (CCW) prvo se pojavi impuls na fazi B a zatim na fazi A. Na taj način se odredi smjer vrtnje, a impuls se prihvati kad su izlazi faze A i faze B u logičkoj jedinici.
- Apsolutni enkoder
Slika 7.
Prilikom rotiranja osovine izmjenjuju se podaci na fotoosjetljivom elementu. Kada bi disk s kodom bio izveden u BCD kodu tada bi se u zoni izmjene podatka mijenjalo više bitova u podatku slika. Osim toga u zoni izmjene podatka nije moguća istovremena izmjena svih bitova u novi podatak radi nesavršenosti diska i fotoosjetljivog elementa. Sklopovi koji obrađuju podatke rade na velikom brzinama te BCD način kodiranja u zoni izmjene podatka dovodi do krivog očitanja u trenutku izmjene podatka.
BCD kod
Slika 8.
Da bi se izbjeglo krivo očitanje podatka u zoni izmjene podatka uvodi se Greyevo kodiranje diska koje osigurava u zoni izmjene podatka promjenu samo jednog bita u podatku.
Slika 9.
Na taj način se eliminira nesavršenost izvedbe kodnog diska i foto osjetljivog elementa, te nema krivog očitanja u zoni izmjene podatka.
Apsolutni enkoder namijenjen je za direktno očitanje pozicije za razliku od inkrementalnog koji poziciju izračunava iz broja impulsa. Kod inkrementalnog enkodera može doći do gubitka podatka o broju impulsa pa time i pozicije (na primjer nestanka napajanja ili reset). Početno stanje odnosno pozicija iz koje se kreče kod inkrementalnog enkodera trebala bi biti uvijek ista (na primjer kod printera). Da bi se izbjegao gubitak broja impulsa novonastali broj se kontinuirano pohranjuje u trajnu memoriju. Kod apsolutnog enkodera nije potrebno pohranjivati podatak jer je dostupan u svakom trenutku.
Primjena apsolutnog enkodera
Apsolutni enkoder je višestruko skuplji od inkrementalnog enkodera i proizvodi se u različitim rezolucijama ovisno o primjeni. Odmah po uključenju očitavamo podatak o poziciji. Primjenjuju se kod sofisticiranijih strojeva (CNC strojevi, industrijski roboti).
Refleksni senzori
-
Refleksija
Predmet koji je bijel izgledao bi crveno u crvenom svjetlu jer bijelo sadrži sve boje. Ali kad bi se plavo svjetlo obasjalo na crvenu podlogu, boja na podlozi bi bila vrlo tamna, jer crvena boja sadrži samo crvenu, ne i plavu, tako da „upija“ plavu svjetlost umjesto da je reflektira.
Boja predmeta ovisi o svjetlu koje ga obasjava. Jedini način da saznate boju predmeta je da ga stavite na sunčevu ili bijelu svjetlost.
Tamnije boje apsorbiraju više različitih valnih duljina svjetlosne energije, dok bijeli ili svijetli predmeti reflektiraju svjetlost većine valnih duljina.
Principi rada refleksnih senzora
Svjetlo koje emitira odašiljač pod utjecajem je objekta ili medija na putu do detektora. Promjena u svjetlosnom signalu uzrokovana je interakcijom s objektom koja zatim proizvodi promjenu u električnom signalu opto-elektroničkog prijamnika (foto tranzistoru).
Glavna razlika između optičkih spajala (opto-coupler) i refleksnih senzora su u relativnom položaju odašiljača i detektora jedan u odnosu na drugi. U slučaju opto-coupler-a prijemnik je nasuprot odašiljača u istoj optičkoj osi, dajući izravnu svjetlosnu vezu između predajnika i prijemnika bez utjecaja refleksije.
U slučaju refleksnih senzora detektor se nalazi pored odašiljača, izbjegavajući izravnu optičku vezu svjetlosti. Refleksni senzor se koristi za širok raspon udaljenosti kao i za materijale i predmete različitih oblika.
Tablica prikazuje izmjerenu refleksiju niza materijala koji su važni za praktičnu upotrebu
senzora. Relativna kolektorska struja (ili faktor optičke veze) refleksnih senzora za refleksiju na različitim materijalima. Referenca je bijela strana Kodak neutralne kartice. Senzor je postavljen okomito na površinu. Valna duljina je 950 nm pri struji transmitera od IF = 20 mA
a na udaljenosti najveće svjetlosne (optičke) veze. Ove vrijednosti vrijede za sve refleksne senzore.
U dijelu „crnilo na bijelom papiru“ sve površine „golim okom“ izgledaju crne ali crne površine emitiraju sasvim različite refleksije na valnoj duljini 950 nm. Posebno je važno uzeti u obzir ovu činjenicu kada koristite refleksne senzore. Refleksija u infracrvenom zračenju može znatno odstupati od onog u vidljivom kod različitih površina tijela.
Izvor: Vishay Semiconductors (Application of Optical Reflex Sensors)
Infracrveni senzor udaljenosti s optičkim lećama
Slika 10.
- Infracrveni (IR) senzori rade na principu emitiranja infracrvenih impulsa i detektiranja reflektiranog signala od objekta u okolini robota.
- Procjena udaljenosti obavlja se na temelju rekonstruiranog signala uz pretpostavku da se infracrvena svjetlost reflektirala od objekta.
- Eliminiranje drugih izvora infracrvene svjetlosti u okolini izvodi se kodiranjem infracrvenog signala emitiranog iz senzora.
- Infracrveni senzori odlikuju se brzim odzivom
- Izlaz senzora izveden je kao analogni ili binarni
Analogni senzor udaljenosti Sharp GP2Y0A02YK
Metoda triangulacije (trokuta)
IR svjetlost projicira se iz IR LE diode i difuzno se reflektira od ciljane površine do leće za prikupljanje. Ova leća nalazi se na određenoj udaljenosti u blizini LE diode. Leća fokusira sliku točke na detektor s linearnim nizom (CMOS niz). Položaj točke na pikselima detektora se obrađuje, bilo putem digitalnih ili analognih signala, kako bi se odredila udaljenost do cilja. Zraka se promatra s jedne strane tako da se vidljivo mjesto točke mijenja s udaljenošću od cilja.
Karakteristike:
- Manji utjecaj boje reflektiranih objekata i njihove refleksivnosti zbog metode mjerenja optičkog trokuta
- Raspon detekcije: 20 do 150 cm
- Vanjski upravljački krug nije potreban te se izlaz spoja izravno na mikroupravljač
- Odziv mjerenja <53ms
Slika 11. (izvor tvornička dokumentacija)
Približna udaljenost u ovisnosti o izmjerenom naponu U[V] može se izračunati pomoću izraza. (Izvor izraza: Jasmin Velagić, Mobilna robotika, Lekcija6).
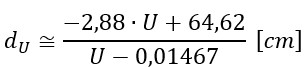
- U slučaju da je optički filtar postavljen ispred dijela odašiljača i detektora, preporučuje se uporaba optičkog filtra koji ima najučinkovitiju propusnost u rasponu valnih duljina emitiranja LED-a za ovaj proizvod (λ = 850 ± 70 nm). Obje strane filtra trebaju biti zrcalno polirane. Također, kao što postoje slučajevi da karakteristike možda neće zadovoljiti udaljenost između zaštitnog poklopca i ovog proizvoda ili debljinu zaštitnog poklopca, koristite ovaj proizvod nakon što potvrdite rad u stvarnoj primjeni.
- U slučaju da postoji objekt u blizini odašiljačke strane senzora između senzora i objekta kojeg detektirate, koristite ovaj uređaj nakon što ste utvrdili da se karakteristike ovog senzora ne mijenjaju objektom.
- Kada je detektor izložen izravnom svjetlu sunca, žarulje s žarnom niti i tako dalje, postoje slučajevi da ne može točno izmjeriti udaljenost. Uzmite u obzir dizajn tako da detektor nije izložen izravnoj svjetlosti iz takvog izvora svjetlosti.
- Udaljenost do zrcalne površine objekta ponekad se ne može točno izmjeriti. U tom slučaju promijenite kut ugradnje senzora za točnije mjerenje udaljenosti.
- U slučaju da reflektirajući objekt ima graničnu crtu čiji se materijal ili boja razlikuju, kako bi se smanjilo odstupanje mjerne udaljenosti, preporuča se postaviti senzor prema slici 12.
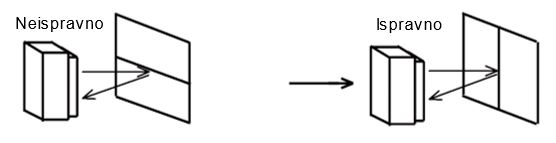
Slika 12.
- Kako bi se smanjilo odstupanje mjerne udaljenosti smjerom kretanja reflektirajućeg objekta, preporuča se postaviti senzor prema slici 13.
Slika 13.
Binarni senzor udaljenosti
Očitani analogni podatak sadrži informaciju o udaljenosti prepreke od senzora i kao primjer možemo odabrati očitani napon od 1,5V. Iz dijagrama možemo očitati udaljenost od približno 8cm i 40cm. Potrebno je detektirati o kojoj se stvarnoj udaljenosti radi, koristeći pomoćni senzor. U jednostavnim izvedbama to može biti kontaktni senzor s produljenim ticalima koja se aktiviraju na potrebnoj udaljenosti cca 15cm ili digitalni refleksni optički senzor koji se koristi istodobno s ovim senzorom kao tip Sharp GP2Y0D413K0F.
Slika 14. (izvor tvornička dokumentacija)
Ukoliko je izlaz digitalnog senzora u logičkoj „1“ tada se predmet nalazi u zoni od 0,5cm do 14cm. Udaljavanjem od prepreke na 14cm izlaz senzora mijenja stanje u logičku „0“. Kada se iz veće udaljenosti približavamo prepreci tada senzor iz stanja logičke „0“ odlazi u stanje logičke „1“ na udaljenosti od 13cm. Ta razlika od 1cm naziva se histereza senzora. Svi izlazi binarnih senzora koriste histerezu, jer ukoliko ne bi koristili histerezu tada bi izlaz u točki promjene oscilirao.
Refleksni senzori bez optičkih leća
Parametri i praktična primjena refleksnih senzora za detekciju promjene refleksije
Refleksni senzor se koristi za primanje reflektiranog signala od objekta. Ovaj signal daje informacije o položaju, kretanju, veličini ili stanju (npr. kodiranje) objekta. Parametar koji točno opisuje funkciju optičke veze je optička prijenosna funkcija senzora (OT). To je omjer primljene (ɸr) i emitirane (ɸe) snage zračenja.
Dodatni parametri senzora, kao što su radno područje, rezolucija optičke udaljenosti objekta, osjetljivost i točka prebacivanja u slučaju lokalnih promjena refleksije, izravno su povezani s ovom optičkom prijenosnom funkcijom.
U slučaju refleksnih senzora s foto tranzistorima kao prijamnicima, omjer Ic/IF (omjer kolektorske struje Ic i struje foto emitera IF) poznat kao faktor vezanja „k“.
Približni odnos postoji između k i OT:
- B trenutno pojačanje
- S = Ib/Fr (spektralna osjetljivost foto tranzistora)
- h = IF/Fe (faktor proporcionalnosti između IF i Fe odašiljača)
Na slici 15. prikazane su krivulje intenziteta zračenja, Ie, odašiljača prema struji foto elementa (IF), odnosno osjetljivosti detektora prema zračenju (Ee). Gradijenti oba jednaki su jediničnom nagibu. Ovo predstavlja mjeru odstupanja krivulja od idealne linearnosti parametara. Postoji dobra proporcionalnost između Ie i IF i između Ic i Ee gdje su krivulje paralelne s jediničnim gradijentom. Veća proporcionalnost poboljšava odnos između faktora vezanja, „k“ i funkcije optičkog prijenosa.
Slika 15.
Izvor: Vishay Semiconductors (Application of Optical Reflex Sensors)
Faktor vezanja „k“
U slučaju refleksnih senzora, specifikacija faktora vezanja korisna je samo uz definiranu refleksiju i udaljenost. Njegova vrijednost je dana kao postotak i ovdje se odnosi na difuznu refleksiju (90%) bijele strane Kodak neutralne kartice na udaljenosti maksimalnog spajanja svjetla.
Osim struje odašiljača (IF), temperature, faktor vezanja također ovisi o udaljenosti od reflektirajuće površine i frekvenciji odnosno brzini promjene reflektirajuće površine.
Za sve refleksne senzore, krivulja faktora vezivanja kao funkcija struje predajnika (IF), ima maksimum na približno 30 mA.
Radni dijagram
Ovisnost struje kolektora foto tranzistora o udaljenosti, A, reflektirajućeg medija prikazana je na slikama ?? za refleksni senzor proizvođača Vishay tip TCRT1000.
Podaci su snimljeni za Kodak neutralnu karticu s 90% dIFuznom refleksijom koja služi kao reflektirajuća površina, postavljena okomito na senzor. Udaljenost, A, mjerena je od površine
refleksni senzor. Struja emitera, IF, održavana je konstantnom tijekom mjerenja. Stoga ova krivulja također pokazuje tijek faktora vezivanja i optičke prijenosne funkcije na udaljenosti i naziva se radni dijagram refleksnog senzora. Radni dijagrami svih senzora (slika 16.) pokazuju maksimum na određenoj udaljenosti, Ao. Ovdje je optička veza najjača. Za veće udaljenosti struja kolektora pada kvadratnom funkcijom. Kada amplituda, I, padne manje od 50% svoje maksimalne vrijednosti, radni raspon je optimalan.
Slika 16.
Rezolucija i točka okidanja
Ponašanje senzora s obzirom na nagle promjene refleksije pri pomaku određeno je s dva parametra:
- rezolucijom
- točkom okidanja
Ako se refleksni senzor vodi preko reflektirajuće površine s refleksijskim valom, zračenje koje se reflektira natrag na detektor postupno se mijenja (slika 17.). Površina, g, koju zajedno vide odašiljač i detektor, određuje zračenje koje prima senzor. Tijekom kretanja tu površinu postupno prekriva tamni odsjaj.
Slika 17.
Sukladno krivulji detektiranog zračenja, promjena struje kolektora nije nagla, već postupno prelazi od više prema nižoj vrijednosti. Kao što je ilustrirano na slici ??, struja kolektora pada na vrijednost Ic2, koja odgovara refleksiji tamnog raspona, ne u točki Xo, već u točkama Xo + Xd/2, pomaknutim za Xd/2. Pomak signala odgovara nesigurnosti pri snimanju položaja promjene refleksije i određuje razlučivost i točku okidanja senzora. Točka okidanja je pozicija na kojoj je senzor u potpunosti zabilježio prijelaz svijetlo/tamno, tj. raspon između točaka Xo + Xd/2 i Xo – Xd/2 oko Xo. Pomak, Xd, prema tome, odgovara širini ili toleranciji točke okidanja. U praksi se dionica koja leži između 10 i 90% razlike Ic = Ic1 – Ic2 uzima kao Xd. To odgovara vremenu porasta generiranog signala jer postoji i kretanje i brzina. Analogno vremenu preklapanja, pomak, Xd, opisuje se kao udaljenost preklapanja. Razlučivost je sposobnost senzora da prepozna male strukture.
Primjer krivulje refleksije i strujnog signala za crnu liniju širine d na svijetloj pozadini (npr. na listu papira). Linija ima dva prijelaza svijetlo/tamno, pa je udaljenost preklapanja Xd/2 dvaput detektirana.
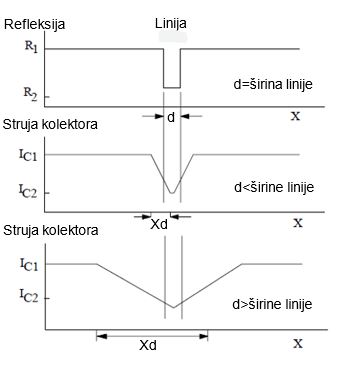
Slika 18.
Crta se jasno prepoznaje sve dok je širina linije d≥ Xd. Ako je širina manja od Xd, promjena struje kolektora, Ic1 – Ic2, odnosno signal koji se može obraditi, postaje sve manji, a prepoznavanje sve nesigurnije. Preklopna udaljenost (Xd) može se uzeti kao razlučivost senzora. P preklopna udaljenost (Xd), uglavnom ovisi o mehaničkom/optičkom dizajnu senzora i udaljenosti do reflektirajuće površine. Na njega također utječe relativni položaj osi odašiljača-detektora.
Slika 19.
Krivulje označene položajem 1 na dijagramima odgovaraju prvom položaju. Os odašiljača -detektora senzora bila je okomita na liniju razdvajanja prijelaza.
U drugom položaju (krivulja 2), os odašiljača-detektora bila je paralelna s prijelazom.
U prvom položaju (1) svi refleksni senzori imaju bolji razlučivost (manja udaljenost prebacivanja) nego u položaju 2. Senzor može prepoznati linije manje od pola milimetra na udaljenosti ispod 0,5 mm.
Budući da zračenje koje prima detektor senzora uvelike ovisi o udaljenosti, može doći do slučaja kada je razlika između zračenja koje reflektira objekt na pozadini potpuno izjednačena s udaljenošću unatoč različitim faktorima refleksije. Čak i ako senzor ima dovoljnu rezoluciju, više neće davati signal koji se može obraditi zbog male razlike refleksije. U takvim primjenama potrebno je ispitati postoji li dovoljan kontrast. To se izvodi uz pomoć radnog dijagrama senzora i faktora refleksije materijala.
Osjetljivost, tamna struja i preslušavanje
Najniža fotoelektrična struja koja se može obraditi kao koristan signal u detektoru senzora određuje najslabiju iskoristivu refleksiju i definira osjetljivost refleksnog senzora. To određuju dva parametra
- tamna struja foto tranzistora
- preslušavanje
Tamna struja
Foto tranzistor kao prijemnik pokazuje malu tamnu struju, ICEO, od nekoliko nA na 25°C. Međutim, to ovisi o primijenjenom naponu kolektor-emiter, VCE, i u mnogo većoj mjeri o temperaturi, T (slika 20.).
Slika 20.
Preslušavanje
Preslušavanje između odašiljača i detektora refleksnog senzora promatra se preko struje (Icx). Ta struja kolektora fotoelektričnog tranzistora izmjerena u normalnim radnim uvjetima IR odašiljača bez reflektirajućeg medija bez ambijentalnog svjetla. Time se određuje koliko je moguće jamčiti izbjegavanje izravne optičke veze između odašiljača i detektora senzora. Pri IF = 20 mA, struja preslušavanje Icx je približno 15 nA za CNY70, TCRT1000 i TCRT5000.
Zbog dizajna i optičkih razloga, odašiljač i detektor postavljeni su vrlo blizu jedan drugome. Signali električnih smetnji mogu se generirati u detektoru kada odašiljač radi s impulsnim ili moduliranim signalom. Prijenosna sposobnost smetnje snažno se povećava s frekvencijom.
Tamna struja i preslušavanje istosmjerne i izmjenične struje čine ukupna struja kvara kolektora, Icf. Ova struja određuje osjetljivost senzora. Struja kolektora uzrokovana promjenom refleksije uvijek bi trebala biti najmanje dvostruko veća od struje kvara kako bi senzor mogao pouzdano identificirati signal koji se može obraditi.
Ambijentalno svjetlo
Ambijentalno svjetlo je još jedna značajka koja može narušiti osjetljivost i, u nekim okolnostima, cijelu funkciju senzora refleksa. Učinak ambijentalnog svjetla koje pada izravno na detektor uvijek je vrlo problematičan. Ambijentalno svjetlo smanjuje osjetljivost senzora. Jaka postojana svjetlost može, ovisno o dimenzioniranju (RL, VC), zasititi fotoelektrični tranzistor. Senzor je u ovom stanju "slijep". Više ne može prepoznati promjenu refleksije. Isječeno ambijentalno svjetlo stvara netočne signale i glumi nepostojeće promjene refleksije. Neizravna ambijentalna svjetlost, tj. ambijentalna svjetlost koja pada na reflektirajuće objekte, uglavnom smanjuje kontrast između objekta i pozadine.
Smetnje uzrokovane ambijentom svjetlosti uglavnom je određena različitim svojstvima refleksije materijala koja pak ovise o valnoj duljini.
Ako ambijentalno svjetlo ima valne duljine za koje je omjer faktora refleksije objekta i pozadine isti ili sličan, njegov utjecaj na funkciju senzora je mali. Njegov se učinak može zanemariti za niske intenzitete.
S druge strane, faktori refleksije objekta/pozadine mogu se međusobno razlikovati na takav način da pozadina reflektira ambijentalno svjetlo mnogo više od objekta. U tom slučaju kontrast nestaje i objekt se ne može detektirati.
Također je moguće da senzor detektira nebitan objekt jer reflektira ambijentalno svjetlo mnogo više od svoje okoline. U praksi, ambijentalno svjetlo najčešće proizlazi iz žarulje sa žarnom niti, fluorescentne ili štedne žarulje. U tablici 2 dato je nekoliko približnih vrijednosti zračenja ovih izvora. Vrijednosti se odnose na udaljenost od približno 50 cm, spektralni raspon od 850 do 1050 nm. Vrijednosti u tablici samo su smjernice za procjenu očekivanog ambijentalnog zračenja.

U praktičnim primjenama općenito je prilično teško precizno odrediti ambijentalno svjetlo i njegove učinke. Stoga se od samog početka njegov utjecaj pokušava svesti na najmanju moguću mjeru korištenjem odgovarajućeg mehaničkog dizajna i optičkih filtara. Detektori
senzora su opremljeni optičkim filterima za blokiranje vidljive svjetlosti. Nadalje, mehanički dizajn senzora je takav da onemogućuje ambijentalnom svjetlu izravno ili bočno djelovanje na detektor za udaljenosti objekta do 2 mm. Ako je izvor ambijentalnog svjetla poznat i relativno je slab, u većini slučajeva dovoljno je procijeniti očekivanu snagu tog svjetla na ozračeno područje i uzeti u obzir rezultat pri dimenzioniranju kruga.
AC (izmjenični) rad refleksnih senzora nudi najučinkovitiju zaštitu od ambijentalnog svjetla. Impulsni rad također je od pomoći u nekim slučajevima.
U usporedbi s istosmjernim radom, prednosti su veća snaga odašiljača i ujedno znatno veća zaštita od kvarova. Jedini nedostatak je veća složenost sklopa, koja je u ovom slučaju neophodna. Krug na slici 22 je primjer rada s isječenim svjetlom.
Osnovni spojevi senzora s operacijskim pojačalom
Slika 21.
Operacijsko pojačalo s pozitivnom povratnom vezom tvori izlaznu histerezu koje se namješta vrijednostima otpornika RF i RI.
Slika 22.
Operacijsko pojačalo u invertiranom načinu rada.
Ultrazvučni senzor udaljenosti
Spadaju u grupu senzora indirektnog mjerenja udaljenosti, odnosno po principu ToF (Time of Flight). ToF metoda bazira se na činjenici poznate brzine rasprostiranja zvučnih valova u nekom mediju (zraku, vodi). Prosječna brzina zvuka u zraku iznosi 343m/s, te ovisi o temperaturi i vlažnosti zraka. Za primjenu u edukacijske svrhe može se smatrati da je brzina zvuka u zraku konstantna. Nadalje koristimo činjenicu da se zvuk odbija od prepreke što poznajemo kao jeku (Echo), a da pri tome zadržava istu brzinu rasprostiranja. U mobilnoj robotici edukativne namjene koristimo ultrazvučne senzore kao na slici.
Ultrazvučni senzor sastoji se od predajnika i prijemnika smještenih na istoj pločici. Nakon signala pokretanja mjerenja (Trig) sklop odašilje ultrazvučni signal frekvencije 40KHz, te izlaz senzora postavlja u logičku „1“. Kad prijemnik detektira jeku odaslanog signala vrača izlaz u logičku „0“. Podatak o udaljenosti od prepreke dobiva se iz polovine vremena trajanja izlaza u logičkoj „1“ i poznate brzine zvuka u zraku.
Vremenski dijagram
Slika 23.
Promjenom broja promjena odaslanih na zvučnik može se kodirati odaslani signal. Brojanjem primljenih signala (promjena) jeke potvrđuje se signal od senzora koji je signale odaslao. Takav pristup koristi se kad mjerimo udaljenost s više senzora ukoliko senzor ima mogućnost promjene broja odaslanih signala.
Ultrazvučni senzori koji se koriste u edukativnoj mobilnoj robotici mjere udaljenost od 0,02m do 4m, te zona djelovanja senzora od ±15° od okomice na senzor.
Slika 24.
Slika b prezentira lažno očitanje senzora. Kut prepreke u zoni očitanje od 30° može iznositi <8° što ovisi o hrapavosti površine.
Slika 25.
Jedno mjerenje daje informaciju da se na obodu radijusa nalazi jedan ili više predmeta, dok je prostor unutar kružnog isječka polumjera r prazan.
Određivanje broja prepreka vrši se pomoću više mjerenja uz rotiranje senzora oko svoje osi.
Primjena senzora za skeniranje mape prostora
Izvesti tako da se jedan senzor smjesti na koračni motor koji zakrećemo maksimalno za 30° te očitanjem izlaza za svaki okret rekonstruiramo mapu prostora oko robota. Za takav način potreban je senzor pozicije koračnog motora. Što je zakretni kut manji vršimo više mjerenja ali dobivamo precizniju mapu prostora.
Slika 26.
Drugi način detekcije predmeta u okolini robota izvodi se tako da se po obodu robota smjesti 12 do 16 ultrazvučnih senzora. Pojedinačnim uključivanjem senzora i očitanjem njihovih izlaza rekonstruiramo sliku okoline. Ovaj način očitanje senzora zahtijeva multipleksiranje ulaza i izlaza senzora.
Izrada mape prostora
Slika 27.
Izlaz senzora
Slika 28.
Laserski senzori udaljenosti
Optički mjerni sustavi ponudili su nove načine za određivanje udaljenosti, deformacija ili vibracija točnijim metodama s većim dometom. 1960. fizičar Theodore Maiman izgradio je prvi laser, a od tada su se počele razvijati aplikacije za korištenje novog otkrića. Jedna od najvažnijih primjena bila je uporaba lasera u mjernim metodama.
Optičke metode mjerenja udaljenosti mogu se grupirati u tri kategorije:
- triangulacija
- telemetrija koja se temelji na određivanju tzv. vremena leta
- interferometrija
Triangulacija
Triangulacija je proces koji omogućuje određivanje udaljenosti ili položaja objekata pomoću geometrije sličnih trokuta. Ovu je metodu oko 600. godine prije Krista1 koristio grčki matematičar Thales iz Mileta pri mjerenju visine piramida u Gizi i određivanju udaljenosti do broda koji je bio u moru te se i danas primjenjuje pri mjerenju udaljenosti.
Slika 29.
Udaljenosti F i E su poznate, dok udaljenost G dobivamo od detektora
Laserski izvor koristi se za osvjetljavanje cilja (to može biti objekt, osoba itd.) za koju mjerimo udaljenost. Svjetlost koju reflektira meta detektira se prijemnim sustavom postavljenim bočno u odnosu na izvor lasera, koji se sastoji, na primjer, od leće i detektora osjetljivog na poziciju. Kao što se može vidjeti na (slici 29.), udaljenost do cilja može se odrediti iz sličnosti formiranih trokuta. Imajte na umu da se ovi optički senzori, kod kojih su izvor lasera i detektor na istom uređaju, obično primjenjuju za mjerenje udaljenosti između 10 mm i 1 m.
Triangulacija pomoću trigonometrijskih funkcija
Slika 30.
Distanca d je poznata a kut δ se mjeri i pomoću trigonometrijskog izraza izračunava se udaljenost.
Telemetrija
Impulsna telemetrija
Metoda impulsne telemetrije temelji se na određivanju vremena potrebnog da impuls putuje od odašiljača do cilja a zatim natrag na detektor. Radi se o već opisanoj ToF (Time of Flight) metodi indirektnog mjerenja udaljenosti. Brzina putovanja laserske zrake je brzina svjetlosti, tako da se ova metoda može primjenjivati kod udaljenijih prepreka (>10m). Što je udaljenost prepreke veća preciznost mjerenja je također veća.
Metoda mjerenja pomaka faze (interferometrija)
Koristi se za izrazito precizna mjerenja te primjenjuju se razni interferometri.
Slika 31.
Odašiljač šalje modulirani signal svjetlosti poznate frekvencije te mjeri fazni pomak između i odaslane i reflektirane zrake.
Slika 32.
Valna duljina moduliranog signala:
Udaljenost do prepreke uz konstantnu valnu duljinu:
ɸ - fazni pomak
λ – poznata valna duljina
Senzori za inercijski navigacijski sustav
Akcelerometri
Akcelerometar je elektromehanička komponenta koja mjeri sile ubrzanja.
Te sile mogu biti:
- Statičke (sile gravitacije).
- Dinamičke (uzrokovane vibracijama ili pomicanjem objekta na kojem se nalazi akcelerometar).
Mjerenjem statičke akceleracije uslijed djelovanja gravitacije određujemo kut za koji je akcelerometar nagnut u odnosu na podlogu.
Mjerenjem dinamičke akceleracije analiziramo putanju gibanja tijela na kojem se nalazi akcelerometar.
Slika 33.
Parametri pri odabiru akcelerometra
Akcelerometri izrađuju se u više tehnologija, a najčešće korištena je MEMS (mikro elektromehanički sustav) s promjenjivim kapacitetom. Osigurava akcelerometra malih dimenzija s različitim parametrima na primjer tip MMA8451, LIS302DL, ADXL335, itd.
Odabir akcelerometra najviše ovisi o potrebama samog projekta. Parametri o kojima ovisi izbor akcelerometra su:
- Izlazni signal
- Broj osi
- Mjerni opseg
- Osjetljivost (razlučivost)
- Frekvencija uzorkovanja
- Izlazna impedancija.
- Izlazni signal
Izlazni signal akcelerometra može biti analogni ili digitalni a izbor ovisi o elektronskom sustavu na koji priključujete akcelerometar. Analogni najčešće je potrebno pretvoriti u digitalni, dok digitalni izlaz povezujemo s mikroupravljačem nekim od serijskih komunikacijskih protokola za sučelja.
- Broj osi
Postoje jedno-osno dvo-osni i tro-osni akcelerometri. Za većinu primjena dovoljan je dvo-osni akcelerometar. Ukoliko je potrebno postići 3D pozicioniranje, trebat će vam tro-osni akcelerometar. Akcelerometar potrebno je pravilno orijentirati na platformu s obzirom na smjer gibanja (naprijed-nazad, lijevo-desno, gore-dolje).
- Mjerni opseg
Raspon mjerenja predstavlja maksimalno ubrzanje koje je moguće izmjeriti. Ukoliko akcelerometrom mjerite nagib pomoću zemljine gravitacije, dovoljan je mjrni opseg akcelerometra od ±1.5g (g je jedinica za ubrzanje zemljine gravitacije, iznosi 9.81 m/s2). Za mjerenja kretanja robota ili automobila potrebni su akcelerometri s većim mjernim opsegom od ±2g do ±5g. Za pravilan odabir potrebno je procijeniti očekivanu akceleraciju i odabrati nešto veći mjerni opseg od očekivane akceleracije.
- Osjetljivost
Veća osjetljivost rezultira preciznijim mjerenjem i povezano je s pravilnim odabirom mjernog opsega. Digitalne akcelerometre karakterizira razlučivost odnosno broj bitova kojim prezentiramo dobiveni podatak. Što je veća osjetljivost akcelerometra, potrebna je veća razlučivost.
- Frekvencija uzorkovanja
Brzina uzorkovanja predstavlja broj očitanja akcelerometra po jedinici vremena. Za sporije pokrete dovoljni su akcelerometri s frekvencijom očitanja od 50Hz. Dok za mjerenje jačine vibracija potrebni su akcelerometri frekvencije od nekoliko stotina Hz.
- Izlazna impedancija
Izlazna impedancija daleko je najčešći izvor problema u projektima koji uključuju analogni akcelerometar. U dokumentaciji za PIC i AVR mikroupravljače naglašeno je da za ispravan rad A/D pretvarača priključeni uređaj mora imati izlaznu impedanciju manju od 10kΩ. Analogni akcelerometri nekih proizvođača imaju izlaznu impedanciju od 32 kΩ. Smanjenje izlazne impedancije postiže se korištenjem operacijskih pojačala između izlaza akcelerometra i ulaza mikroupravljača.
Žiroskopi
Žiroskop je uređaj koji služi za mjerenje kutne brzine, te mogu mjeriti kutnu brzinu u jednom, dva ili tri smjera. Žiroskopi s tri osi općenito se implementiraju s akcelerometrom s tri osi kako bi se osiguralo praćenje kretanja sustava u šest stupnjeva slobode. Žiroskopi su se tijekom vremena razvili od mehaničko-inercijskih rotacijskih uređaja, u uređaje raznih oblika s elektroničkim i optičkim sustavima. Svaki od njih koristi neko fizikalno svojstvo sustava koje mu omogućuje otkrivanje kutnog kretanja oko neke osi.
Postoje tri osnovne vrste žiroskopa:
- Rotacijski (klasični) žiroskop
- Vibrirajući žiroskop
- Optički žiroskop
Rotacijski žiroskop
Klasični rotacijski žiroskop koristi zakon očuvanja kutne količine gibanja. Ukupna kutna količina gibanja sustava je konstantna sve dok se ne promijeni vanjskom silom. Sastoje se od rotirajućeg diska - rotora (ili mase pričvršćene na os rotacije) koji je postavljen na kardanske prstene (eng. gimbal). Svaki prsten daje disku jedan dodatni stupanj slobode gibanja. Kardanski prstenovi omogućuju rotaciju rotora bez potrebe za vanjskim okretnim momentom koji djeluje na žiroskop. Dokle god se žiroskop rotira, on će održavati stalnu orijentaciju. Kada je prisutan vanjski zakretni moment oko ulazne osi, na izlaznoj osi se očitava pomak proporcionalan zakretu na ulaznoj osi.
Slika 34.
Žiroskopski efekt može se jednostavno demonstrirati pomoću okretnog uredskog stolca na kojem sjedite s podignutim nogama od poda. U ispruženim rukama zavrtite kotač od bicikla što većeg promjera. Ukoliko pokušate mijenjati od vrtnje kotača bicikla koji se vrti dolazi do zakretanja stolca.
Vibrirajući žiroskopi
Vibracijski žiroskopi su MEMS uređaji, komercijalno dostupni i vrlo malih dimanzija. Temeljno za razumijevanje rada vibrirajućih žiroskopa je razumijevanje Coriolisove sile.
Slika 35.
Vibrirajući žiroskopi sastoje se od mikro-objekta, određene mase, koji je nizom opruga povezan s unutarnjim pomičnim okvirom.
Unutarnji okvir povezano je s vanjskim kućištem preko drugog niza opruga.
Mikro-objekt se stalno kreće u sinusoidi duž prvog niza opruga.
Svaka rotacija sustava uzrokovat će Coriolisovo ubrzanje mikro-objekta, gurajući ga u smjeru drugog seta opruga. Djelovanjem opruga i predmet će se početi kretati u tom smjeru po sinusnom zakonu.
Coriolisova sila se detektira kao promjenjiva kapacitivnost koja se javlja između unutarnjeg i vanjskog kućišta. Promjenjivi kapacitet je smješten tako da se može detektirati amplituda i smjer djelovanja kutne brzine sustava.
Optički žiroskopi
Optički žiroskopi primjenjuju se ubrzo nakon otkrića laserske tehnologije. Prednost ovih žiroskopa je nepostojanje pokretnih dijelova, tako da nisu osjetljivi na mehanička oštećenja. Optički žiroskopi razlikuju se od ostalih vrsta jer se ne oslanjaju na očuvanje kutne količine gibanja. Umjesto toga, njihova funkcionalnost ovisi samo o postojanosti brzine svjetlosti.
Optički žiroskopi rade po principu Sagnac efekta. Izvor svjetlosti prolazi kroz namot optičkog vlakna duljine 1000m namotan u krug. Prije ulaza u optičko vlakno snop se dijeli na dva snopa istog intenziteta. Kad snopovi prođu kroz optičko vlakno mjeri se interferencija signala. Interferentni efekt je posljedica rotacije optičkog vlakna oko osi okomite na ravninu u kojoj je postavljen.
Elektronski kompas
Kompasi mjere orijentaciju mobilnog robota u odnosu na magnetske polove Zemlje.
Magnetski senzor visoke osjetljivosti s analognim ili digitalnim izlazom. Proizvode se u više osi mjerenja magnetskog polja.
Žirokompas (fluxgate)
Za razliku od kompasa s magnetiziranom iglom žirokompas pokazuje smjer preko kardanske platforme temeljene na žiroskopu.
Fluxgate kompas potpuno je elektronički, kompas bez pokretnih dijelova.
Tipični fluxgate kompas ima tri male zavojnice žica, od kojih je svaka omotana oko jezgre visoko propusnog magnetskog materijala. Oni su raspoređeni kao ravnomjerno raspoređeni krakovi pod kutom od 120°, kako bi izravno osjetili smjer horizontalne komponente Zemljinog magnetskog polja. Na jednu zavojnicu je doveden izmjenični napon (obično 400 Hz, ali može biti i viši) kao zavojnica magnetske pobude. Druge dvije se koriste kao senzorske zavojnice. Kada su senzorske zavojnice poravnate s vanjskim magnetskim poljem, napon koji inducira pogonska zavojnica je uravnotežen (slika 36a.). Ukoliko se poravnanje s vanjskim poljem mijenja, magnetski tok induciran u dvije zavojnice postaju neuravnotežene, a veličina ove analogne razlike pokazuje smjer vanjskog polja (slika 36b.).
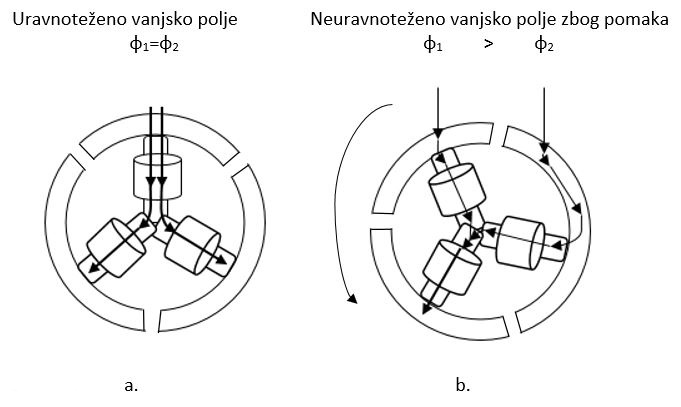
Slika 36.
Klasične zavojnice zamijenjene su planarnom izvedbom zavojnice te se proizvode kao integrirani krugovi.
Inklinometri
Mjerenje orijentacije vektora gravitacije. Najviše se koriste se u građevinarstvu.
Opisani senzori su osnovni senzori koji se koriste kod inercijskih navigacijskih sustava gdje postoji informacija o gravitaciji. Koriste se u navigaciji aviona jer ne koriste GPS signale i ostale navigacijske signale.
Kod primjene u robotici takva vrsta navigacije je preciznija od odometrijske metode i koristi se na većim (vanjskim) površinama. Inercijska navigacija zahtijeva precizne početne uvjete.
Globalni sustav pozicioniranja GPS (Global Positioning System)
GPS je svjetski radio-navigacijski sustav sastavljen od konstelacije 24 satelita i njihovih zemaljskih stanica. Ovi sateliti kruže oko Zemlje na visini od oko 20 000 km.
Komponente GPS-a
- Sateliti – zamjenjuju funkciju zvijezda koje su nekad služile za navigaciju.
- Zemaljske postaje – Prate i kontroliraju satelite, te identificiraju njihovu lokaciju.
- Prijemnici – Prijemnici primaju signale sa satelita te ih obrađuju u poziciju na zemlji.
Dopplerov efekt temeljni je princip koji se koristi u GPS-u. Promjene u frekvenciji signala GPS satelita pomažu u određivanju lokacije i brzine. Dopplerov efekt ključan je za funkcionalnost GPS-a i mnogih drugih sustava u našem današnjem svijetu (slika 37.).
Slika 37.
GPS prijamnik prima signal sa svakog GPS satelita. Svaki GPS satelit šalje jedinstveni signal kako bi GPS prijemnik mogao dekodirati i izračunati točnu lokaciju satelita. Signali se kreću brzinom svjetlosti što GPS prijemniku pomaže u matematičkim izračunima za određivanje položaja. GPS prijamnik koristi te podatke za izračunavanje lokacije korisnika i prikazivanje na elektroničkom uređaju pomoću procesa poznatog kao 'Trilateracija'. Djeluje tako da mjeri udaljenost do svakog satelita prema ukupnom vremenu potrebnom za primanje poslanog signala (ToF metoda).
Za izračunavanje 2D položaja i kretanja po tragu, jedinica GPS prijemnika mora se zaključati na radio signal najmanje tri satelita. Ćetiri ili više satelita omogućuju prijamniku da identificira 3D položaj.
Za dovršetak matematičkog izračuna; GPS prijamnik koristi točan položaj najmanje četiri satelita. Udaljenost do svakog satelita procjenjuje četiri ključne vrijednosti:
- Zemljina širina
- Zemljina dužina
- Elevacija
- Vrijeme
Nakon što GPS prijamnik identificira položaj korisnika, može izračunati druge podatke na temelju vašeg sljedećeg položaja i oduzimanja vremena i udaljenosti, kao što su:
- Udaljenost putovanja
- Brzinu
- Udaljenost do odredišta
Slika 38.
Slika 39.
Mjerenje vremena putovanja radio valova
U određeno vrijeme satelit počinje odašiljati digitalni uzorak koji se naziva pseudo-nasumični kod. Prijemnik počinje pokretati isti digitalni obrazac također u isto vrijeme kad je satelit poslao pseudo-nasumični kod. Kada satelitski signal stigne do prijemnika, njegov signal će malo zaostajati za reprodukcijom signala u prijemniku.
Duljina kašnjenja jednaka je vremenu putovanja signala. Prijemnik to vrijeme množi s brzinom svjetlosti kako bi odredio koliko je udaljen odašiljač. Pod pretpostavkom da je signal putovao ravnom linijom, ovo je udaljenost od prijemnika do satelita.
Kako bi izvršili ovo mjerenje, i prijemnik i satelit trebaju satove koji se mogu sinkronizirati do nanosekunde. Da biste napravili satelitski sustav za pozicioniranje koji koristi samo sinkronizirane satove, trebali biste imati atomske satove ne samo na svim satelitima, već iu samom prijemniku. Realizacija atomskog sata u prijemniku bila bi preskupo rješenje.
Svaki satelit ima atomski sat, ali sam prijemnik koristi obični kvarcni sat. Prijemnik gleda dolazne signale s četiri ili više satelita i mjeri vlastitu netočnost, odnosno postoji samo jedna vrijednost za "trenutno vrijeme" koju prijemnik može koristiti. Točna vremenska vrijednost uzrokovat će da se svi signali koje prima prijamnik poravnaju na jednoj točki u prostoru. Ta vremenska vrijednost je vremenska vrijednost koju drže atomski satovi u svim satelitima. Prijamnik postavlja svoj sat na vremensku vrijednost atomskog sata u satelitima.
Kada mjerite udaljenost do četiri locirana satelita, možete nacrtati četiri sfere koje se sve sijeku u jednoj točki. Tri sfere će se presijecati čak i ako mjerenja nisu najtočnija, ali četiri sfere se neće presijecati u jednoj točki ako mjrenja netočna. Budući da prijemnik sva svoja mjerenja udaljenosti vrši pomoću vlastitog ugrađenog sata, sve udaljenosti će biti proporcionalno netočne.
Prijemnik može lako izračunati potrebnu prilagodbu koja će uzrokovati da se četiri sfere sijeku u jednoj točki. Na temelju toga ponovno postavlja svoj sat kako bi bio sinkroniziran s atomskim satom satelita. Prijemnik to radi stalno kad god je uključen, što znači da je gotovo jednako točan kao atomski satovi u satelitima.
Kako bi informacija o udaljenosti bila od koristi, prijemnik također mora znati gdje se sateliti nalaze. Sateliti putuju u vrlo visokim i predvidljivim orbitama. GPS prijemnik jednostavno pohranjuje almanah koji mu govori gdje bi svaki satelit trebao biti u bilo kojem trenutku.
Za određivanje lokacije GPS satelita GPS prijamnik zahtijeva dvije vrste podataka: almanah i efemeride (tablice koje donose podatke o položaju i gibanju nebeskih tijela za neko razdoblje). Ove podatke kontinuirano odašilju GPS sateliti, GPS prijamnik prikuplja i pohranjuje te podatke.
Parametri za odabir GPS modula
- Točnost GPS pulsa
Ovo je točnost impulsa od 1 Hz primljenog od GPS modula ili skupa čipova. (Tipično ±25 ns)
- GPS osjetljivost
Minimalna razina signala koja omogućuje GPS prijamniku da dobije ili prati GPS signal.
- Osjetljivost akvizicije
Minimalna razina za uspješno dobivanje informacija o GPS signalu dok se sustav prvi put uključuje. (obično oko -140 do -150 dBm)
- Osjetljivost praćenja
Minimalna razina za održavanje fiksne lokacije nakon što se postigne (obično -150 do -160 dBm)
- Vrsta sučelja
Kada koristimo bilo koji GPS čipset ili GPS modul, preko nekog sučelja, moramo dobiti informacije o GPS paketu. To sučelje može biti UART, I2C, SPI itd.
- Radni napon napajanja
Ovo je napon preko kojeg radi GPS modul ili čipset. (Obično +2,5 V ili +3,3 V)
- Raspon radne temperature
Ako koristite GPS modul za vanjsku primjenu, potrebno je provjeriti minimalni i maksimalni raspon radne temperature. (Tipično -40 do +85 stupnjeva C)
Proizvođači GPS modula prijamnika:
- Maestro Wireless
- Linx Technologies
- Antenova
- Parallax Inc.
- Skyworks Solutions
- SparkFun Electronics
- Wi2Wi
- Taiyo Yuden
- Trimble
Vizualni senzori
Charge-coupled device (CCD) senzor
Senzor za prikupljanje svjetlosti i generiranje slike. Izrađuje se u obliku integriranog kruga s poljima
svjetlosno osjetljivih elemenata (piksela). Dimenzija piksela su od 5μm x 5μm do 25μm x 25μm i ima mogućnost kapacitivnog punjenja, odnosno pražnjenja. Gustoća piksela varira od 1600/mm2 do 40000/mm2.
Fotoni koji udaraju o površinu silicija stvaraju slobodne elektrone kroz fotoelektrični efekt.
Fotoelektrični efekt
Emisija elektrona iz metala pod utjecajem svjetla odnosno elektromagnetskog zračenja. Emitirani elektroni nazivaju se foto elektronima.
Pokusima je utvrđeno:
- Kinetička energija izbijenih elektron a ne ovisi o jakosti apsorbirane svjetlosti nego o njenoj frekvenciji.
- Broj izbijenih elektrona bio je proporcionalan jakosti svjetlosti.
Princip rada CCD
- Kondenzatori svih piksela se u cijelosti napune te nakon toga počinje proces integracije (generiranja)
- Svjetlost obasjava svaki piksel (fotoni udaraju u piksel) te oslobađaju elektrone koji su obuhvaćeni električnim poljem (fotoelektrički efekt).
- Svaki piksel akumulira različit iznos energije ovisno o ukupnom broju fotona koji su “udarili” u njega.
- Nakon završetka integracije (generiranja) relativan iznos energije piksela se pohranjuje i čita (proces prikupljanja).
Slika 1.
Slika 1. prikazuje pojednostavljen presjek CCD. Silicij nije raspoređen tako da formira pojedinačne piksele odnosno pikseli su definirani položajem elektroda I1, I2 i I3 iznad samog CCD-a. Ako se na elektrodu I3 dovede pozitivan napon, tada će pozitivni potencijal privući sve negativno nabijene elektrone blizu područja ispod elektrode a sve pozitivno nabijene rupe će biti odbijene od područja oko elektrode. Kao posljedica toga formirat će se "potencijalni spremnik" u kojem će biti pohranjeni svi elektroni proizvedeni od strane fotona.
Povećanjem količine svjetlosti koja pada na CCD, generira sve više elektrona koji pune „potencijalni spremnik“. Količina elektrona koja se može pohraniti ispod piksela u „potencijalnom spremniku“ naziva se kapacitetom spremnika. Kako bi se spriječilo da svjetlo napuni ili premaši kapacitet spremnika mora se ograničiti pomoću zatvarača (kao kod fotoaparata). Stoga se slika objekta izrađuje otvaranjem zatvarača, "integriranjem" na određeno vrijeme kako bi se ispunila većina elektrona u „potencijalnom spremniku“, a zatim zatvaranjem zatvarača kako bi se osiguralo da kapacitet spremnika nije premašen .
CCD se sastojati od velikog broja piksela („potencijalnih spremnika“) raspoređenih vodoravno u redovima i okomito u stupcima. Broj redaka i stupaca definira veličinu CCD-a, tipične veličine su 1024 piksela u visinu i 1024 piksela u širinu.
Razlučivost CCD-a definirana je veličinom piksela, također i njihovim razdvajanjem (razmak piksela). U većini astronomskih CCD-a pikseli se međusobno dodiruju i stoga će CCD rezolucija biti definirana veličinom piksela, obično 10-20µm. Dakle, CCD veličine 1024x1024 imao bi veličinu slike fizičkog područja od oko 10 mm x 10 mm.
Istodobno s izbijenim elektronima stvaraju se pozitivni naboji ili rupe. Ako se ništa ne poduzme, rupa i elektroni će se rekombinirati i osloboditi energiju u obliku topline, stoga je potrebno skupiti elektrone na mjestu gdje su generirani te prebrojati ih kako bi se stvorila slika.
Slika 2.
Svaki piksel posjeduje tri elektrode I1, I2 i I3. Samo jedna od ovih elektroda je potrebna za stvaranje „potencijalnog spremnika“ dok druge dvije elektrode su potrebne za prijenos naboja iz CCD-a. Na slici 2. (pozicija 1.) prikazuje naboj koji se skupio ispod elektrode I2. Svaki piksel „potencijalni spremnik“ skupio je naboja proporcionalno svjetlosti koja je pala na taj piksel.
Za prijenos naboja iz CCD-a, može se stvoriti novi „potencijalni spremnik“ dovođenjem elektrode I3 u visoko stanje „1“. Naboj se sada dijeli između elektroda I2 i I3 (pozicija 2.).
Ako se elektroda I2 stavi u nisko stanje „0“, naboj će se u potpunosti prenijeti ispod elektrode I3 (pozicija 3.).
Izmjenom stanja na elektrodama prikupljani naboji migriraju do vertikalne migracije koja odvodi naboj na A/D pretvorbu i program za rekonstrukciju slike. Sljedećom izmjenom vodoravne migracije naboj je spreman za transport vertikalnom migracijom slika3.
Slika 3.
A/D pretvorba
Analogno-digitalna (A/D) elektronika mjeri napon koji stvara paket elektrona na serijskom izlazu i pretvara ga u elektronički broj koji se potom može digitalno spremiti. Metoda očitavanja ovog napona naziva se integracija s dvostrukim nagibom (DSI) i koristi se kada je potreban apsolutno najmanji šum. Brže očitavanje piksela dovodi do veće razine šuma koje unosi u mjerenje. A/D pretvornik za svaki generirani piksel može se izravno povezati s brojem elektrona koji se nalaze u tom pikselu.
A/D elektronika ima ograničenja na najveći broj koji može opisati. Na primjer, 8-bitni A/D sustav ne može predstaviti broj veći od 255.
16-bitna elektronika ne može opisati broj veći od 65535.
CCD-ovi bolje kvalitete općenito mogu sadržavati od 70 000 do 500 000 elektrona u bilo kojem pikselu. Budući da je to više od broja 65535 koje A/D elektronika može izraziti, moraju se koristiti različita pojačanja da bi elektronika pristupila cijelom dinamičkom rasponu CCD-a.
Puni kapacitet „potencijalnog spremnika“ – piksela
Puni kapacitet piksela najveći je broj elektrona koji piksel u CCD-u može primiti. Taj broj može varirati (10ke- do 500ke-) i uglavnom ovisi o fizičkim dimenzijama piksela (što je piksel veći, to više elektrona može pohraniti). Kada piksel ima previše elektrona u sebi, višak naboja počinje se prelijevati u susjedne piksele i stvara artefakte slike poznate kao „cvjetanje“.
CCD hlađenje
CCD-ovi imaju koristi od rada na nižim temperaturama jer je sama toplinska energija dovoljna da pobudi vanjske elektrone u pikselima koji se ne mogu razlikovati od stvarnih elektrona koje proizvode fotoni. Taj se šum naziva tamna struja. Za svakih 6-8 °C hlađenja, postoji oko 2X smanjenje ukupne stope stvaranja tamne struje. CCD uređaji ne rade znatno ispod –120°C zbog negativnog učinka na učinkovitost prijenosa naboja. Duboko osiromašeni CCD-ovi, hlađenje ispod -90°C, smanjuje tamnu struju na prihvatljivu razinu.
Elektroni u bilo kojem danom pikselu pomiču preko CCD-a, tako da oni posljednji očitani paketi elektrona akumuliraju više naboja dok se pomiču u paralelnom pomaku CCD-om. To stvara gradijent signala tamne struje koji se povećava kako se CCD očitava – karakteristika toplog CCD-a.
Hlađenje CCD-a na –110°C zahtijeva da uređaj bude toplinski izoliran od okoline i stoga mora biti u vakuumskoj komori. CCD-ovi obično se hlade Peltierovim spojevima (termo električni hladnjaci).
CMOS senzor
CMOS senzor ili komplementarni metal-oksid-poluvodič je vrsta elektroničkog čipa koji se koristi za pretvorbu fotona u elektrone pri digitalnoj obradi slike. CMOS senzori koriste za stvaranje slika unutar digitalnih kamera, digitalnih CCTV kamera, skenerima, čitačima barkodova. Niska cijena proizvodnje CMOS-a omogućuje stvaranje jeftinih potrošačkih uređaja.
CMOS senzor radi na principu fotoelektričnog efekta pretvarajući fotone pomoću diode u električnu energiju. Za razliku od CCD senzora, CMOS senzori će promijeniti električni naboj u napon izravno unutar piksela. Trenutačno su dostupni CMOS senzori s izvanrednom kvalitetom slike i velikim brojem snimaka u sekundi, pa se koriste u industrijskim kamerama visokih performansi.
Dizajn CMOS senzora
U CMOS senzoru slike, naboj fotoosjetljivog piksela, kojeg generira dioda, na lokaciji piksela pretvara se u napon, a signal se multipleksira kroz redak i stupac i prima ga digitalno-analogni pretvarač slika 4.
Slika 4.
Sklopovi za podršku nalaze se uz svaku foto diodu istom čipu, čineći proces izrade jeftinijim u usporedbi s CCD-ima. Smanjuju se troškove potrebnih pratećih sklopova, složenost kamere, a također i potrošnju energije. CMOS senzori slike trebaju niži napon od CCD senzora, a time i manju snagu potrošnju. CMOS senzori slike omogućuju nasumični pristup i stoga je moguće očitavanje temeljeno na regiji što omogućuje CMOS senzorima slike rad s vrlo velikim brzinama. CMOS senzori slike mogu raditi pri više od 500 sličica u sekundi pri rezoluciji mega piksela.
CMOS senzori slike još nisu uspjeli zamijeniti CCD u aplikacijama gdje se zahtijeva vrlo niski šum. CMOS senzori slike sa svojim brojnim pojačalima na svakom pikselu generiraju šum fiksnog uzorka, koji nastaje zbog varijacija procesa tijekom proizvodnje.
CMOS senzori slike imaju manju osjetljivost na svjetlo u usporedbi s CCD-ima. U CCD-u svaka pojedinačna jedinica samo skuplja svjetlost dok pojačala unutar piksela u CMOS senzoru slike smanjuju područje prikupljanja svjetlosti i stoga su manje osjetljiva na svjetlost.
CMOS senzori slike aktivno se koriste jer su puno jeftiniji i omogućuju integraciju strujnog kruga za obradu s fotoreceptorom, omogućujući nasumični pristup, povećavajući izlaznu propusnost.
CMOS senzor je digitalni uređaj gdje svaki piksel uključuje fotodiodu i tri tranzistora za obavljanje različitih zadataka kao što su aktiviranje i resetiranje piksela, pojačanje i pretvorba naboja te multipleksiranje ili odabir slika 5.
Slika 5.
Aktivni senzor piksela
Active Pixel Sensor (APS) vrsta je senzora slike koji je dizajniran sa skupom senzora piksela. U ovoj vrsti senzora, svaki senzor piksela uključuje pojačalo i foto detektor.
Ovaj senzor je proizveden kroz CMOS proces, pa je poznat kao CMOS APS. CMOS APS senzor koristi foto detektor za otkrivanje svjetla i pretvara ga u električni signal. Nakon toga, ovaj signal se pojačava kroz različite tranzistore i zatim se pomiče kroz fiksne žice i multiplekser.
CMOS APS aplikacije uglavnom uključuju kamere za snimanje pokreta, rendgenske slike, web kamere, endoskopske kamere, digitalnu radiografiju itd.
Pasivni senzor piksela
U ovim senzorima svaki pasivni piksel uključuje pristupni tranzistor i fotodiodu. Pikseli u ovom senzoru raspoređeni su u dvodimenzionalnu strukturu putem žice za omogućavanje pristupa koju dijele pikseli unutar sličnog retka, a izlazna žica se dijeli kroz stupac.
Svaki kraj stupca uključuje pojačalo. Ovi senzori uglavnom pate od nekoliko ograničenja kao što su sporo očitavanje, nedostatak skalabilnosti i visoka buka. Stoga se ti problemi mogu riješiti dodavanjem pojačala svakom pikselu.
CMOS senzor IC
Slika 6.
Najčešće korišteni IC CMOS senzor je modul senzora kamere OV7670. Niskonaponski, osjetljiv i male veličine CMOS modul senzora slike koji se koristi za snimanje i obradu slike. Ovaj modul dostupan je s različitim konfiguracijama pinova od različitih proizvođača. OV7670 IC pruža prozorske 8-bitne i full-frame slike u različitim formatima.
OV7670 uključuje senzor slike, A/D pretvarač, generator vremena, procesor analognog signala, skalar slike, DSP, generator testnog uzorka, digitalni video port, LED, itd.
Ovaj senzor slike može se kontrolirati putem SCCB (Serial Camera Control Bus) koja je I2C sučelje s 400KHz maksimalne CLK frekvencije.
Poveznica za sučelje CMOS OV7670 modula kamere: https://www.openhacks.com/uploadsproductos/ov7670_cmos_camera_module_revc_ds.pdf
Monokromatski i kolor senzori
Za senzore vidljive svjetlosti (ne infracrvene, UV ili X-zrake) postoje dvije glavne vrste
Senzori u boji imaju dodatni sloj koji se nalazi ispod mikro leće, filter u boji, koji apsorbira neželjene valne duljine boje tako da je svaki piksel osjetljiv na određenu valnu duljinu boje slika 7.
Slika 7.
Bayerov uzorak filtra koristi niz od 50% zelene, 25% crvene i 25% plave boje. Dok većina kamera u boji koristi Bayerov uzorak filtra, dostupni su i drugi uzorci filtra koji imaju različite rasporede uzoraka.
Zbog fizičkih razlika između jednobojnih senzora i senzora u boji, kao i razlika između tehnologija proizvođača senzora i strukture piksela, različiti senzori će osjetiti svjetlost u različitim stupnjevima. Jedan od načina razumijevanja osjetljivosti senzora na svjetlost je čitanje grafikona njegovog spektralnog odziva (poznatog i kao grafikon kvantne učinkovitosti).
Slika 8.
Na slici 8. prikazan je grafikon crno-bijele i kolor verzije istog modela senzora.
Na osi X je valna duljina (nm), a na osi Y je kvantna učinkovitost (%). Većina kamera u boji za strojni vid ima instalirane IR filtere za blokiranje IR valnih duljina, te time uklanja IC šum i križanje boja sa slike, što najbolje odgovara načinu na koji ljudsko oko tumači boju.
Važna funkcija senzora je njegov tip zatvarača. Dvije glavne vrste elektroničkih zatvarača:
- globalni zatvarač
- rolo zatvarač
Ovi tipovi zatvarača razlikuju se po svom radu i konačnim rezultatima snimanja, posebno kada se kamera ili meta kreću.
Globalni zatvarač
Slika 9. prikazuje vrijeme ekspozicije globalnog senzora zatvarača. Svi pikseli započinju i završavaju ekspoziciju u isto vrijeme, ali očitavanje se i dalje događa red po red. Ovaj vremenski raspored daje slike bez iskrivljenja i njihanja. Globalni senzori zatvarača ključni su za snimanje objekata koji se kreću velikom brzinom.
Slika 9.
Rolo zatvarač
Slika 10. prikazuje vrijeme ekspozicije senzora rolo-zatvarača. Vrijeme ekspozicije je različito redak po redak s resetiranjem i očitavanjem u pomaknutim vremenima. Ova ekspozicija red po red proizvodi izobličenje slike ako su cilj ili kamera u pokretu. Senzori rolo vrata nude izvrsnu osjetljivost za snimanje statičnih ili sporo pokretnih objekata.
Slika 10.
Primjedbe