Spoj CAN Busa koji osigurava pouzdan rad
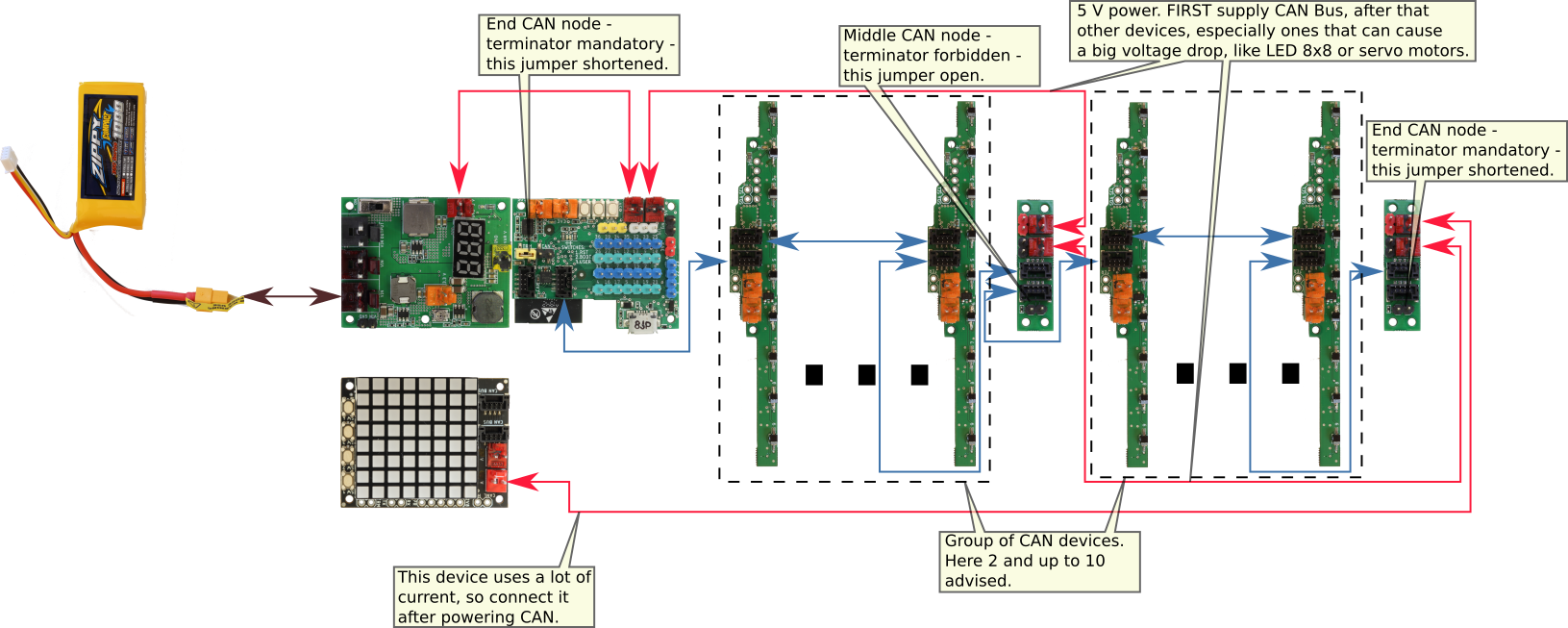
Na slici je prikazan pravilan način spajanja CAN Bus jedinica. Proučite sliku pažljivo jer bi odmak od ovih pravila mogao uzrokovati nestabilan rad i ispadanje pojedinih CAN jedinica tokom rada robota.
- CAN Bus, plave linije.
- Napajanje 5 V, crvene linije.
- Baterija 12 V, tamnocrvena linija.
Jako je bitno odmah s napajanja 5 V ići žicama na ESP 32 pločicu i dalje na pločice koje dovode napajanje na segmente CAN sabirnice, bez da između njih postoje potrošači, pogotovo veliki, koji će uzrokovati padove napona.
Svaka grupa CAN jedinica (označeno crtkano) može imati do desetak uređaja, ali ovaj broj nije jednoznačan jer ovisi o potrošnji svake jedinice u unutar grupe. Na slici su po 2 reflektivna senzora u svakoj grupi. Tri točkice između označavaju potencijalne druge CAN Bus jedinice, koje nisu na slici.
Jedinice su povezane tankim CAN kablovima (plave linije), kako bi konektori bili što manji i robot kompaktniji. Posljedica je da i na ovim žicama postoji pad napona koje je potrebno minimizirati. Na slici su 2 grupe, što je obično previše za male robote, koji mogu imati samo jednu grupu.
Na svakom kraju CAN sabirnice moraju biti otpornici 120 Ω (terminatori) i ne smiju biti nigdje drugdje. Otpornici ih uključuju kratkim spajanjem jumpera, kao na slici.
Originalan dizajn CAN Busa se sastoji od parangalnog spoja s debelim središnjim žicama. U biti je taj dizajn poštovan i ovdje, ali žice su tanke jer je želja bila učiniti sistem pogodnim za vrlo male robote.
Primjedbe
Projekt "Uvod u robotiku" sufinanciran je iz Europskog socijalnog fonda, poziv "Jačanje kapaciteta organizacija civilnoga društva za popularizaciju STEM-a".
Relevantne stranice:
Sadržaj vježbe za virtualne radionice isključiva je odgovornost Hrvatskog društva za robotiku.